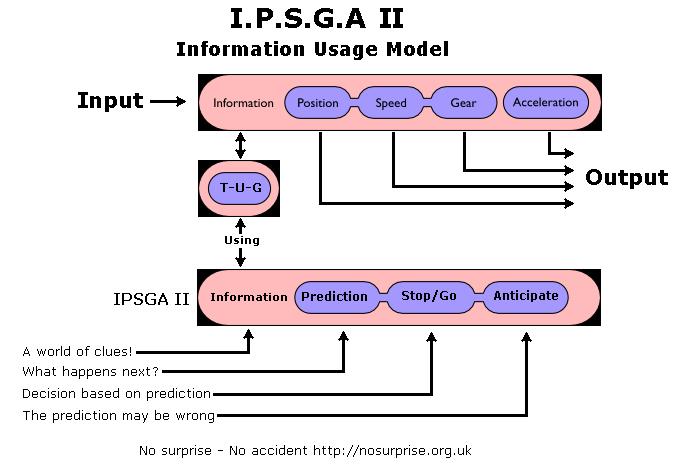
Riding a motorbike is all about acquiring and learning motor skills, but there is always the fundamental problem that we can’t learn motor skills from a book. Good advice and descriptions of process and technique can be learnt and stored as memories in the neo-cortex thanks to the Hippocampus, but motor skills can only be learnt through acting, doing and feedback which is the role of the Basal Ganglia and the Cerebellum. When we recall things from memory to describe an action process we tend to recall that which has been stored via the Hippocampus rather than recalling the vastly more complex motor actions we actually do use when riding.
Our Basal Ganglia and Cerebellum don’t much like giving up the secrets of motor actions because they have not been stored in nice linear sequences like the language that we used to memorise advice. Instead they are stored as a vastly complex and interconnected sequence of patterns that have been formed via the input of every sense simultaneously. A good example of this is trying to describe the sequence and combinations of actions required to walk from one side of the room to the other. Most of us are lucky enough to be able to walk, but precious few of us could describe the process in anything other than the most basic and simplistic terms. Analysing complex motor actions and then breaking them down into linear sequences that can be written down or spoken so that they can be learnt by somebody else is a really difficult job and not one to be taken lightly.
Luckily we humans don’t need all that book larnin’ in order to become very good at learning motor functions. What we do need however is a very powerful goal/feedback system that tells us whether the actions we have carried out are the right ones needed to reach a goal. The more precise the goal and the more overt the feedback system then the quicker we can learn the correct motor actions and the quicker we can store them away ready for automatic use the next time we need them. In the world of motorcycling decent goal/feedback systems are noticeable by their absence due in the main to a lack of ‘secondary goals’. A secondary goal is obvious in the game of Golf for example where the primary goal of the game is to get the little ball into the hole, but the secondary goal is to get the ball into the hole in as few a strokes as possible. All sports have secondary goals of one kind or another and it is these secondary goals that are used by sports coaches and psychologists to help people become master’s of the sport.
When you have precise secondary goals and plenty of overt feedback the rate of skill acquisition starts to go off the chart, but when these secondary goals are missing, progress if any is always going to be painfully slow.
In my own sport of Moto Gymkhana we have an exercise called GP8 which is five times round a figure of eight course. This is a doddle for most people, but as soon as a secondary goal is introduced, which in this case is doing it against the clock, the entire task takes on an entirely different complexion. Thanks to this addition we know that the fastest time for doing the exercise is 26 seconds, so a rider that takes 50 seconds to do it has some idea of how much more they have yet to learn. What road riders really need then is some form of goal/feedback system that they can use to improve their motor skills, because without one they really aren’t going to become as good as they need to be.